杂项
2024 回顾
2024年的生活回顾
职业
点云序列压缩格式对比
在工作中有存储点云数据的需求,因此对不同格式的点云压缩率做了比较。
职业
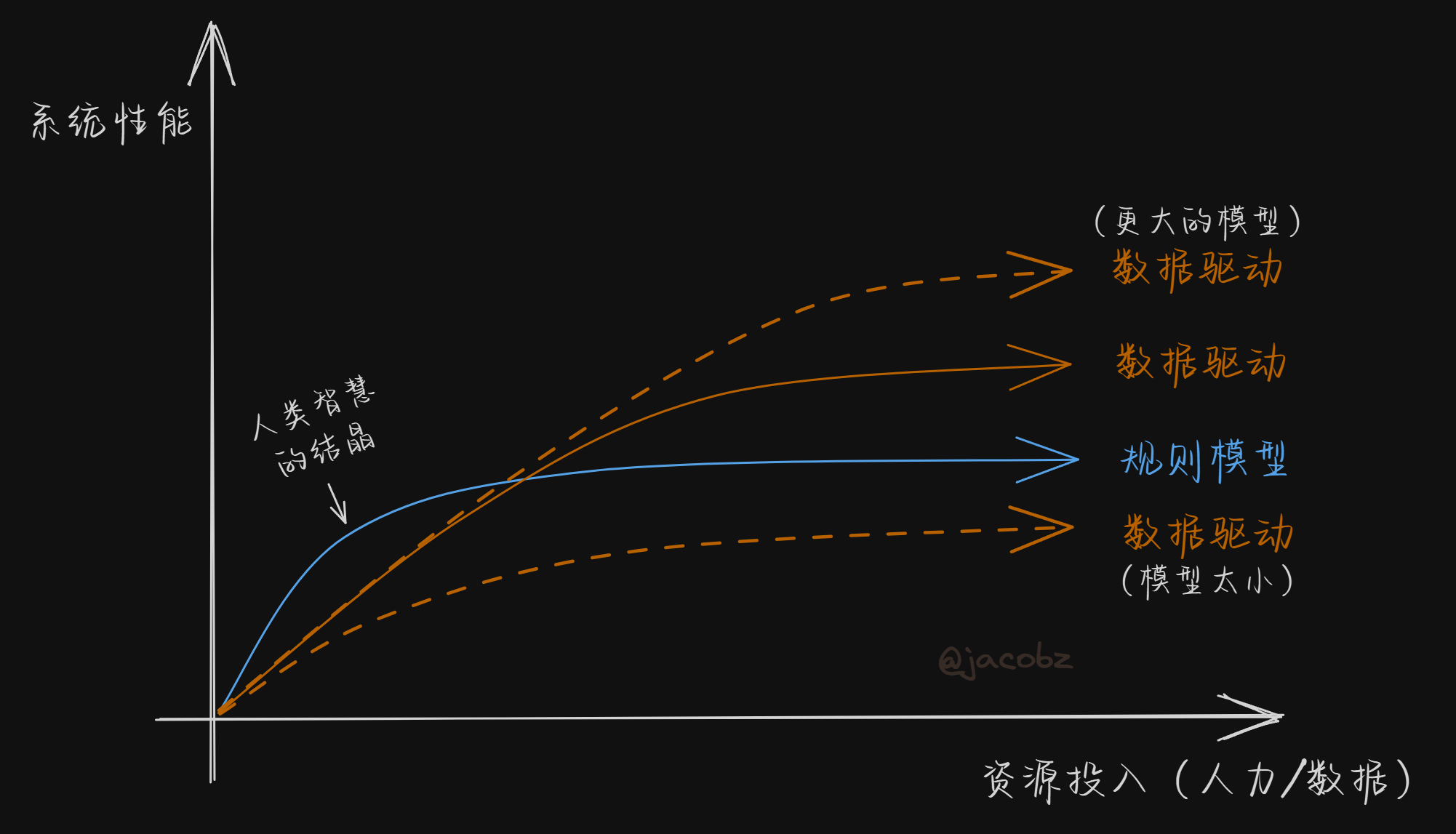
端到端自动驾驶到底靠不靠谱 — 以及为什么我不认为它是未来
我的博客里第一篇与我本职工作相关的帖子 - 我们来聊聊端到端自动驾驶吧!
杂项
梅森素数测试软件教程
本文介绍如何利用CPU和GPU计算GIMPS任务。
脑洞
我眼中的下一代互联网
人们常说的Web3并不是我眼里最理想的下一代互联网。
工具
将博客移植到Hugo平台
一直想做却一直下不去手的事情,今天终于弄了。
编程
(C语言)变长数组的陷阱
编程
长浮点数(long double)的陷阱
1
2
…
8